Folgende Ortungstechnologien finden im Indoor-Bereich mit Abstand am häufigsten Verwendung:
- Funklaufzeitmessung im Ultra Wide Band Bereich, häufig mit UWB-Ortung abgekürzt
- Zonenortung mittels Bluetooth Low-Energy (BLE) Beacons
- Stationäre und mobile RFID-Reader sowie RFID-Gates zur Identifikation von Passiv-Transpondern, welche an Aufträgen, Ladungsträgern und Behältern befestigt sind
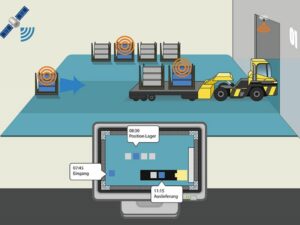
Eine flächendeckende und gleichzeitig genaue Ortung in Echtzeit ist indoor nur mit einem UWB-RTLS möglich. Das Prinzip ist der GPS-Ortung sehr ähnlich, nur dass anstelle der Himmels-Satelliten feste, im Raum verteilte UWB-Transponder als Orts-Referenzen fungieren. Man spricht daher im übertragenen Sinne häufig von einem sog. Indoor-GPS.
Die Bluetooth-Ortung erreicht zwar nicht die hohe Genauigkeit und Zuverlässigkeit der UWB-Ortung; hat jedoch den Vorteil, dass die in Smartphones, Tablets u.a. IT-Geräten bereits eingebauten BLE-Chips für deren Ortung verwendet werden können. D.h., für ein solches Ortungssystem sind neben den Bluetooth-Transpondern lediglich die zugehörigen Ortsreferenz-Transponder (sog. Bluetooth-Beacons) sowie die Lokalisierungssoftware erforderlich. Das spart Montage- und Inbetriebnahmezeit und damit Kosten.
Passive RFID-Transponder sind prädestiniert zur Identifikation und raum-bzw. zonengenauen Ortung von Objekten in hohe Stückzahlen (z.B. > 5.000 Stück). Die Genauigkeit ist dabei primär abhängig von der Dichte und Anordnung der RFID-Antennen (Ortungszonen). Die Mindest-Distanz zwischen 2 Lesepunkten (Checkpoints) muss dabei mindestens so groß sein wie die zugehörige Lesedistanz. Diese beträgt bei passiver RFID zwischen wenigen cm bis max. 15m.
Die sog. WLAN-Ortung kann nur in elektromagnetisch sterilen Umgebungen erfolgreich Anwendung finden, z.B. in Krankenhäusern, öffentlichen Gebäuden u.ä.. Für typische Industrieumgebungen ist die WLAN-Ortung aufgrund der oft wechselnden metallischen Umgebung und den dadurch hervorgerufenen Reflexionen nicht gut geeignet.